Generation of Safety-Critical Scenarios for Autonomous Vehicles
MSc thesis of Yuhang Yang proposes to use reinforcement learning to generate of safety-critical scenarios for autonomous vehicles.
Developing reliable autonomous driving algorithms poses challenges in testing, particularly when it comes to safety-critical traffic scenarios involving pedestrians. An open question is how to simulate rare events, not necessarily found in autonomous driving datasets or scripted simulations, but which can occur in testing, and, in the end may lead to severe pedestrian related accidents.
Yuhang Yang’s thesis presents a method for designing a suicidal pedestrian agent within the CARLA simulator, enabling the automatic generation of traffic scenarios for testing safety of autonomous vehicles in dangerous situations with pedestrians. The pedestrian is modeled as a reinforcement learning agent with two custom reward functions that allow the agent to either arbitrarily or with high velocity to collide with an autonomous vehicle. Instead of significantly constraining the initial locations and the pedestrian behavior, we allow the pedestrian and autonomous car to be placed anywhere in the environment and the pedestrian to roam freely to generate diverse scenarios.
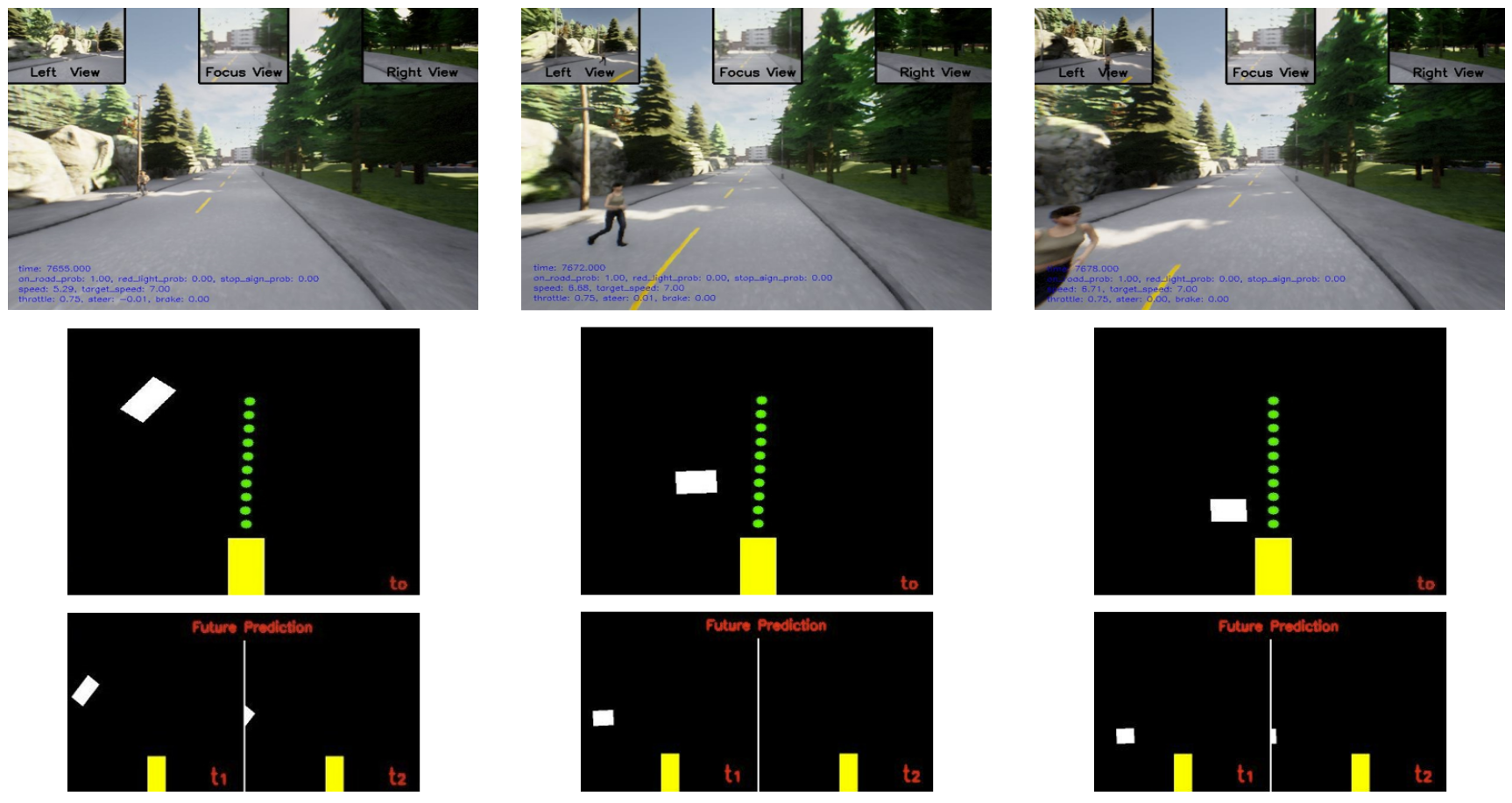
To assess the performance of the pedestrian and the target vehicle during testing, we propose three collision-oriented evaluation metrics. Experimental results involving two state-of-the-art autonomous driving algorithms trained end-to-end with imitation learning from sensor data demonstrate the effectiveness of the suicidal pedestrian in identifying decision errors made by autonomous vehicles controlled by the algorithms.
More information:
Alexander Ilin, Professor of Practice,
Department of Computer Science, Aalto University
alexander.ilin(at)aalto.fi
MSc Thesis: https://aaltodoc.aalto.fi/handle/123456789/120935